Hey, thanks.
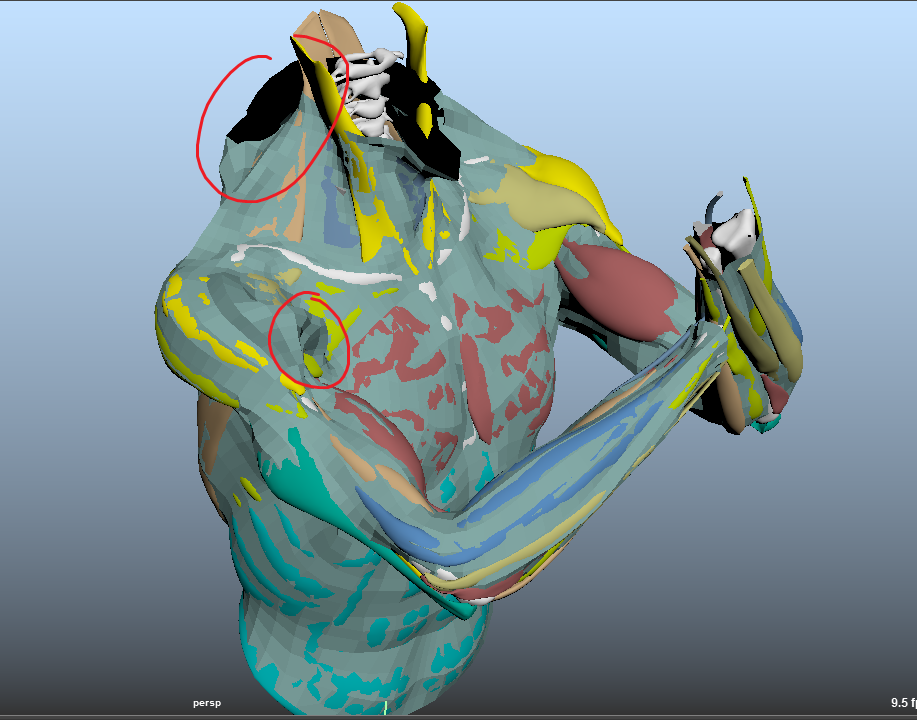
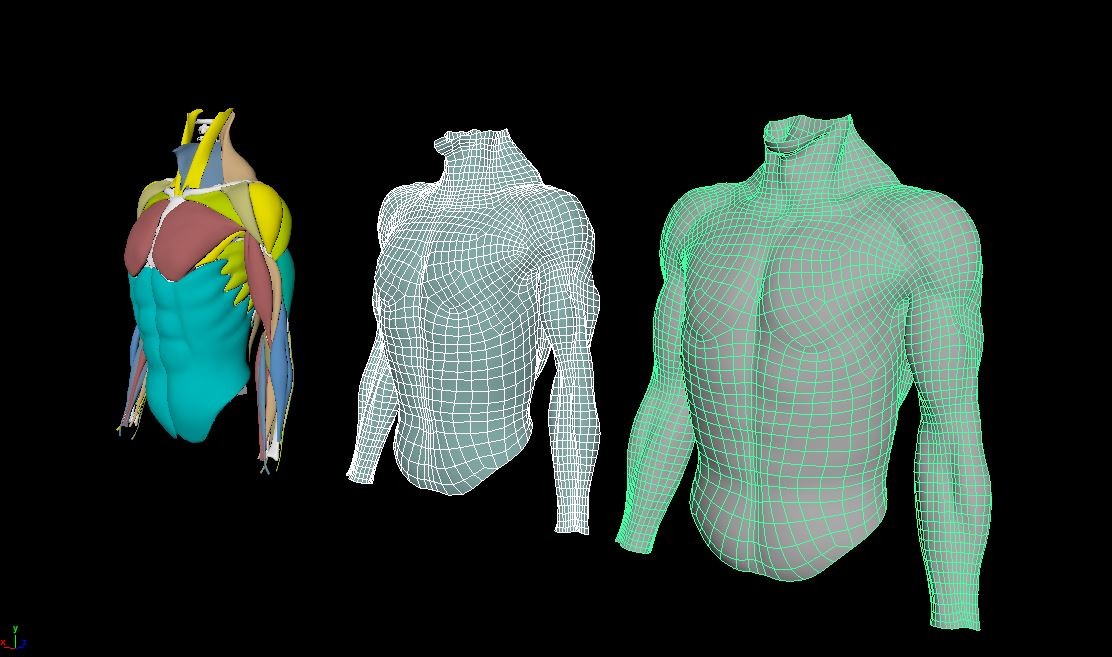
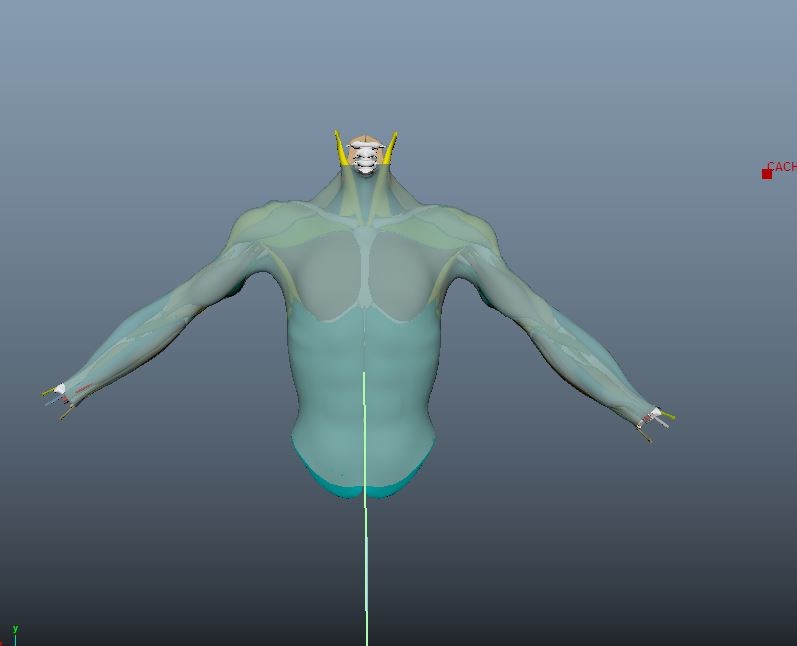
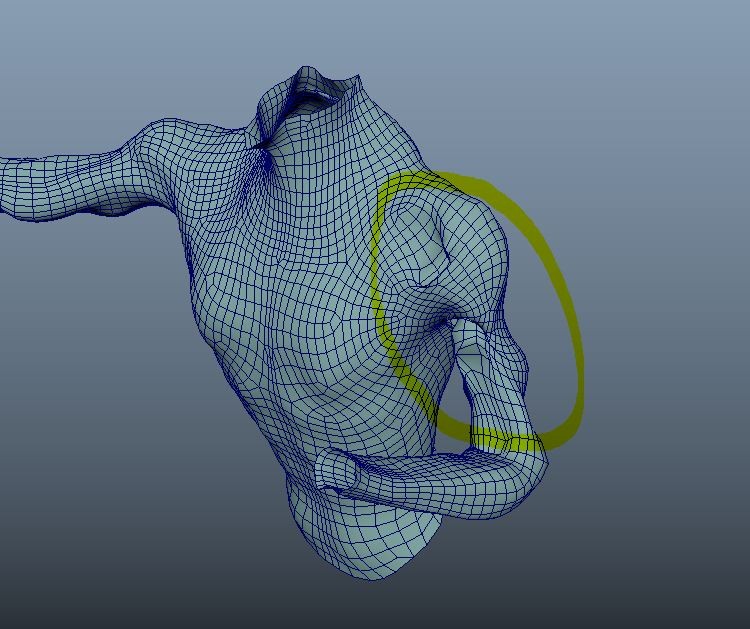
So the main issue is related to your default pose. The arms are side by side with the torso which makes it hard for our tetmeshing style to cope with. See diagram below.
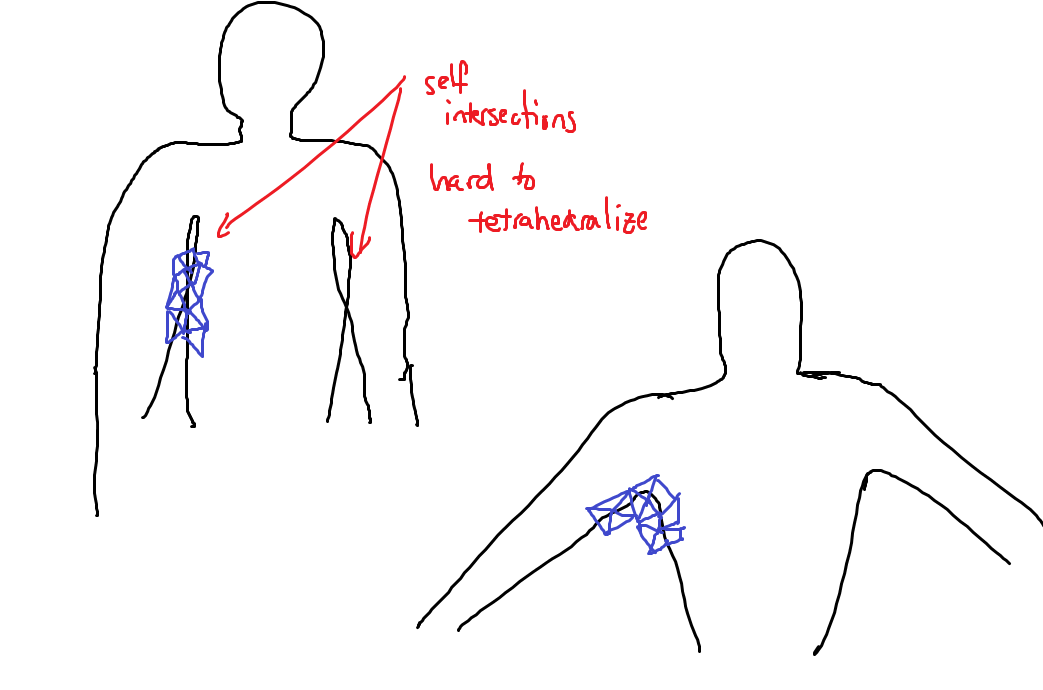
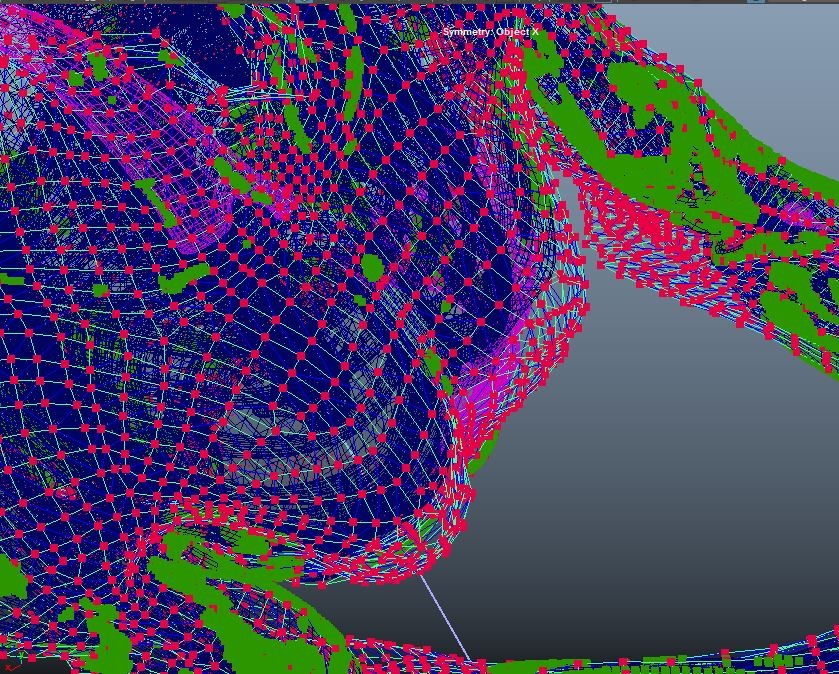
It looks like you've got quite a high tet-resolution to compensate but the self intersections will make it impossible for those surfaces to ever separate with our current tetmeshing algorithm.
Running collisions in Ziva against things that have self-intersections will also very often end in unstable results because Ziva has a hard time working out what is the inside and what is the outside of the mesh in question. This makes it difficult for our collisions to resolve.
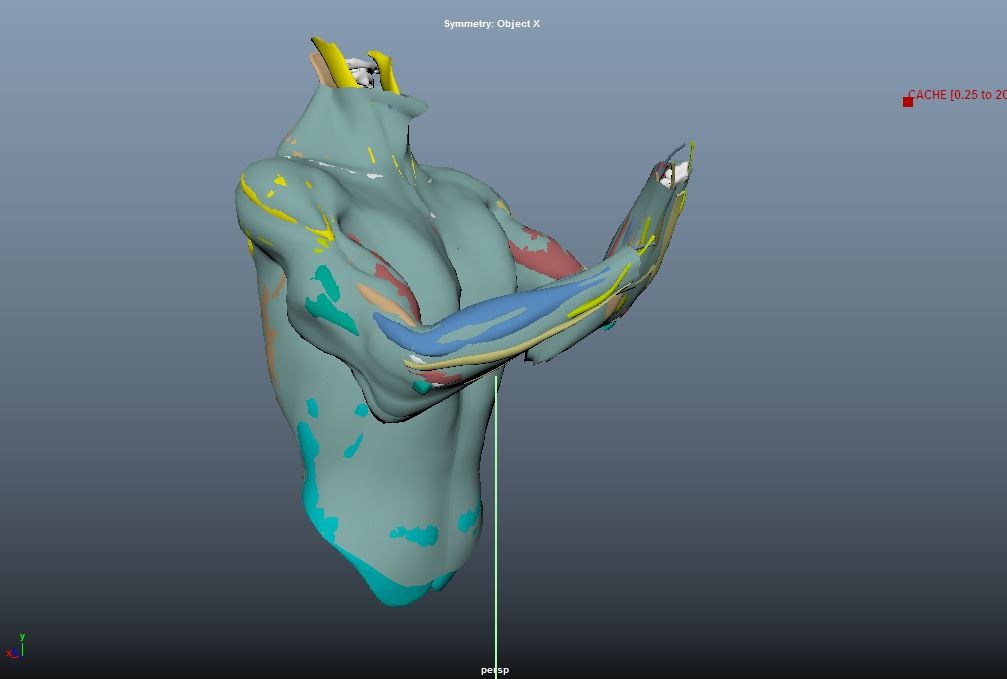
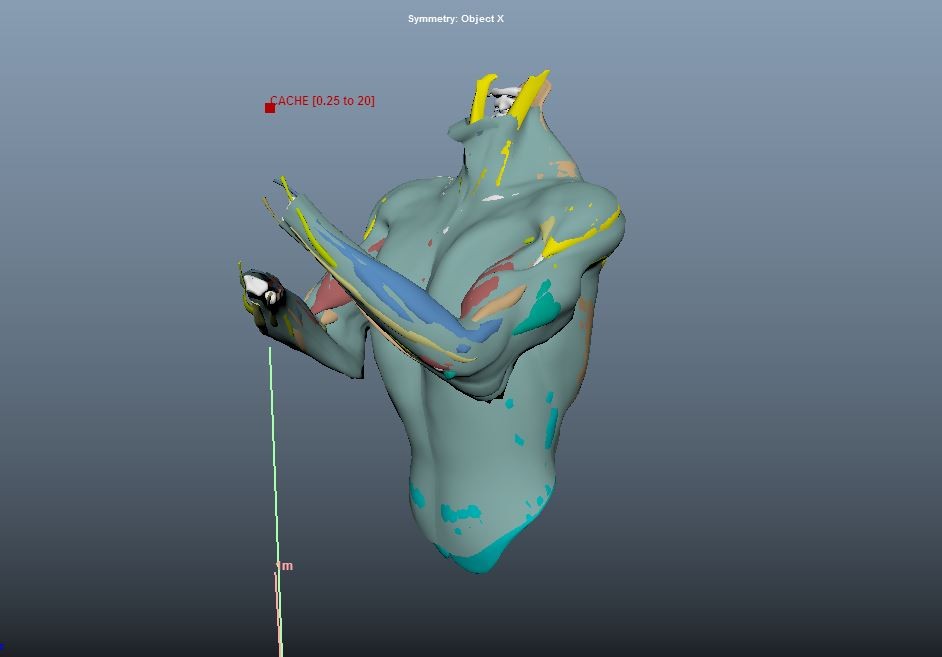
With my experiments just now adjusting values only, I was able to get through about 25 frames before the simulation started exploding due to self-intersection issues.